「Cooperative Adaptive Cruise Control」の版間の差分
編集の要約なし |
編集の要約なし |
||
| 2行目: | 2行目: | ||
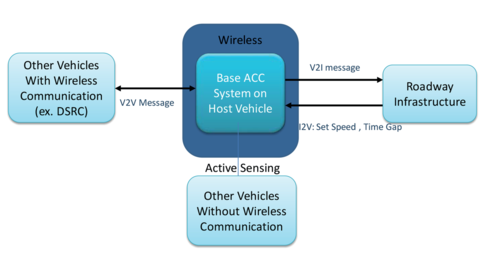
従来の[[アダプティブ・クルーズコントロール|ACC]]で用いられている先行車との車間距離情報に加え、先行車の加減速制御情報を車車間通信(760MHzITS 通信)で取得し加減速制御に用いることで、従来のACCよりも応答遅れや車間距離の変動が少ない走行をすることが可能。より広範な走行シーンでのACCの活用や、長距離走行における運転者の疲労軽減が期待できる。 | 従来の[[アダプティブ・クルーズコントロール|ACC]]で用いられている先行車との車間距離情報に加え、先行車の加減速制御情報を車車間通信(760MHzITS 通信)で取得し加減速制御に用いることで、従来のACCよりも応答遅れや車間距離の変動が少ない走行をすることが可能。より広範な走行シーンでのACCの活用や、長距離走行における運転者の疲労軽減が期待できる。 | ||
[[file:fig 1b.png|link=|center]] | |||